城市NOA技术战局(上):从BEV到VLA,拆解头部玩家技术路线
主要结论:
继2023–2024年BEV+Transformer+Occupancy Network架构成为智能驾驶的感知主流后,2025年起,行业正加速向更高级的**VLM(Vision-Language Model)与VLA(Vision-Language-Action)**模型演进。相较于传统BEV结构仅关注空间几何关系,VLM/VLA引入语言推理模块,可对标志、规则、指令进行语义理解,结合多模态输入(如摄像头图像、语音交互、交通文本信息),生成更泛化、更类人的行为决策。
芯片与算力能力成为支撑城市NOA架构升级的关键基础。2020年前后主流平台算力集中于144 TOPS,如今已普遍跃升至500 TOPS以上,高端平台如蔚来NX9031、理想Thor-U、小鹏图灵AI芯片等更达到千级算力,支撑端到端推理、大模型部署与多模态处理。自研芯片、自建智算中心、自主模型训练正成为具备战略自主能力车企的核心壁垒。
在感知侧,“视觉为主+激光雷达补盲”已成为当前主流配置。视觉方案具备数据规模与算力适配优势,激光雷达则增强空间精度与安全冗余,尤其在无高精地图场景中具备更强稳定性。不同厂商依据策略选择单感知或多模态融合方案,构建安全容错体系。
- 产品背景
近年来,随着特斯拉AutoPilot不断进阶至FSD,辅助驾驶已从L0级定速巡航,逐步拓展至高速NOA,再迈入城市NOA阶段,覆盖更复杂多变的交通环境。智能驾驶正在从“技术亮点”转向“核心卖点”,显著影响消费者购车决策。
以小鹏和问界为例:小鹏G6智驾版配置占比超过70%,问界新M7的大定用户中也有60%以上选择搭载高阶智能驾驶方案。这一趋势标志着,中国智能驾驶市场已全面进入L2+/NOA功能的规模化普及阶段。
L2+辅助驾驶能力包括自适应巡航(ACC)、车道居中控制(LCC)、自动变道(ALC)、高速NOA等,城市NOA则在此基础上,扩展至非结构化路况中的红绿灯通行、环岛绕行、路口博弈等复杂决策工况,对感知精度、决策智能与系统泛化能力提出更高要求。
在城市NOA推进过程中,高精地图鲜度不足、覆盖受限、成本高昂等问题,成为核心瓶颈。为突破此限制,主流技术路线正在从依赖地图的规则驱动方案,全面转向端到端模型驱动 + 自主环境建图 + 多模态策略融合的新范式。
技术架构上,感知模块经历了从前向2D视角 → BEV建图 → Occupancy Network建模的迭代,决策控制模块也正由传统rule-based状态机,向基于神经网络的端到端行为预测发展。2025年起,VLM(视觉语言模型)和VLA(Vision-Language-Action)架构逐步上车,赋予系统语义理解与策略推理能力,成为当前算法演进的前沿方向。
本报告将围绕特斯拉、小鹏、理想、蔚来等具备自研能力的头部品牌,梳理其城市NOA技术路线演进路径,结合软硬件系统方案与市场落地节奏,探讨中国品牌如何在“从BEV到VLA”的产业跃迁中建立领先优势。
- 目标用户与使用场景
L2/L2+辅助驾驶系统主要面向具备一定驾驶经验、希望在日常通勤或长途驾驶中降低疲劳、提升安全性的新能源车主及购车潜在用户。
这类用户普遍关注两个关键问题:
各品牌城市NOA在不同城市、路况下的表现差异;
智驾能力与整车价格之间的性价比。
智能驾驶的核心价值在于:在用户监管下,系统能够预判潜在风险、辅助完成复杂驾驶动作,从而减轻认知负担、降低事故风险。尤其在城市NOA场景中,系统需完成红绿灯识别、路口博弈、避让行人、自主换道等行为,对系统泛化能力、策略鲁棒性和人机交互体验提出更高要求。
因此,城市NOA不仅是“功能拓展”,更代表了整车系统智能化水平的“天花板”。
- 竞品分析
本篇章节主要对于特斯拉,以蔚来理想小鹏为代表的头部企业在“城市导航辅助驾驶功能”的进展上进行对比分析,除此之外还包括,硬件系统方案,软件算法,功能配置,交互逻辑,运营方案,亮点场景等对比。
3.1 调研洞察摘要
城市NOA的落地,标志着行业正从规则驱动向数据驱动、从模块化架构向端到端大模型架构转变。以下趋势尤为明显:
技术架构趋同: 特斯拉、小鹏、蔚来等主流厂商均采用BEV+Transformer+Occupancy Network感知结构,逐步引入端到端神经网络控制器替代传统状态机,提升整体智驾稳定性。
算力平台升级: 主流平台从原先144TOPS提升至500–1000TOPS以上,大算力平台成为支持端到端大模型部署的基础设施。
数据闭环能力强化: 具备自动采集、筛选、标注、仿真重建与在线训练能力的“数据-模型-闭环”体系,成为城市NOA性能提升的核心引擎。
用户体验导向增强: 城市NOA正加速从试点区域向全国多城落地,主机厂纷纷围绕“全国都能开、用户真愿用”目标,推动功能迭代与大模型泛化能力提升。
结论:在城市NOA成为新一代智能驾驶标配的背景下,能否构建“低成本、高泛化、大闭环”的自研体系,将成为厂商能否突围的核心分水岭。
3.2 技术方案演进与“去高精地图化”
高速NOA因场景结构稳定,长期采用规则驱动+高精地图方式实现;而城市NOA因存在海量动态变量与非结构化场景,传统Rule-based方案难以覆盖,技术路线普遍演进为以下三个阶段:
基于高精地图的三段式结构: 感知–规划–控制,依赖静态地图与有限状态机;
BEV+Transformer感知融合结构: 引入Occupancy Network构建3D空间占据图,提升遮挡处理与障碍识别能力;
端到端 + 多模态语义推理架构(VLA): 引入视觉语言模型、扩散策略网络、博弈推理模块等,实现感知–理解–决策一体化。
“去高精地图化”已成为城市NOA发展的行业共识,各家方案通过Occupancy Network、弱地图辅助、分布式建图等方式逐步替代静态地图依赖,以提升系统泛化能力与落地效率。
3.2.1 特斯拉技术演进:
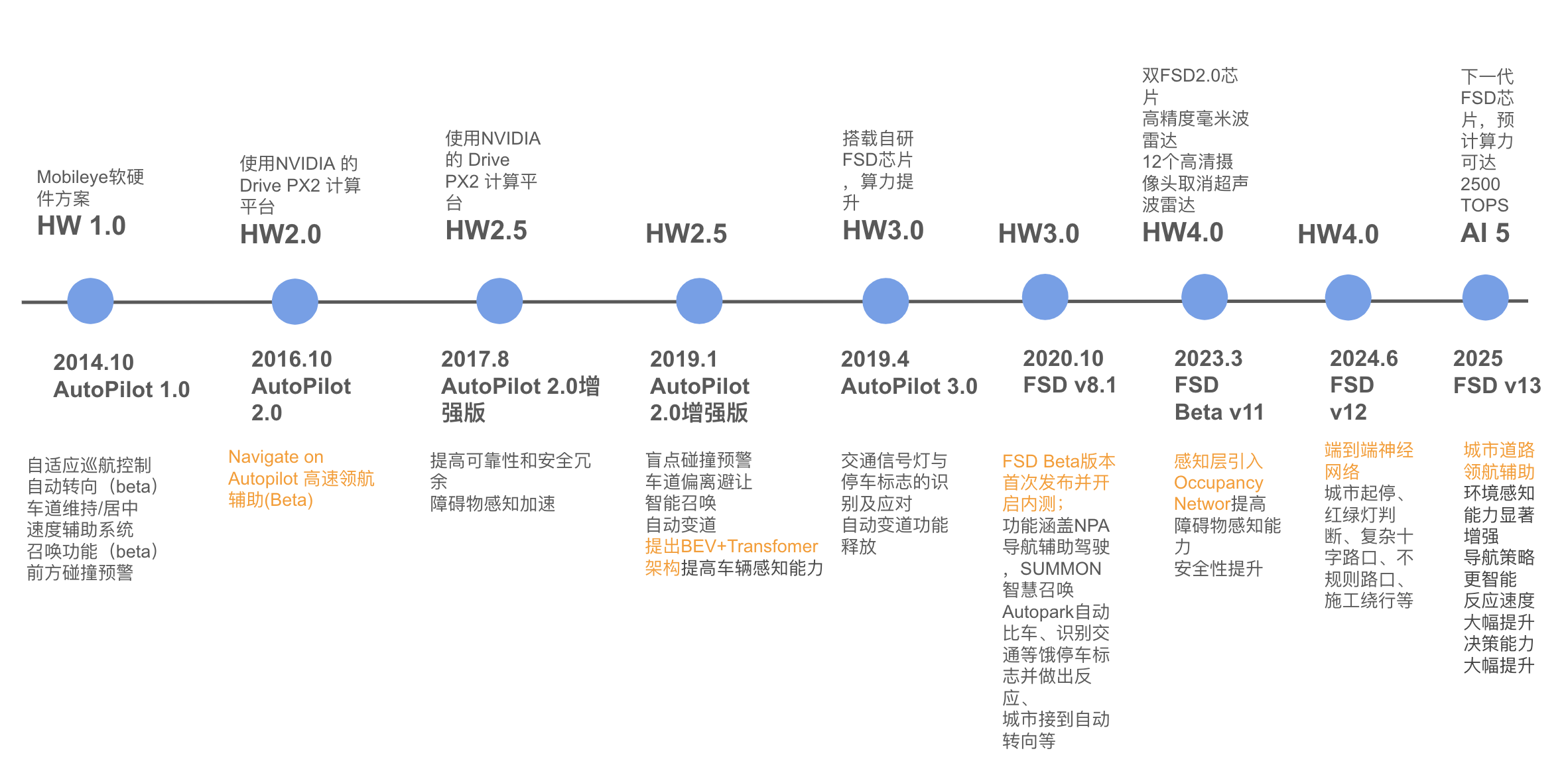
自2014年发布AutoPilot 1.0以来,特斯拉持续引领辅助驾驶从规则驱动走向数据驱动、再走向端到端神经控制的范式演进。
HW1.0 + Mobileye平台(2014–2016): 初代AutoPilot基于Mobileye方案,支持基本的巡航与车道保持功能,但受限于单摄像头配置与规则逻辑,系统泛化能力有限。
HW2.0/2.5 + Drive PX2(2016–2018): 特斯拉转向自研算法,采用8摄像头+12雷达传感器+NVIDIA PX2平台,基于FSM(有限状态机)实现早期的高速NOA能力(Navigate on AutoPilot Beta)。
HW3.0 + 自研FSD芯片(2019–2020): 发布自研AI芯片并正式推出FSD Beta内测计划,引入EAP(增强版辅助驾驶)并释放自动变道功能。感知层构建多模态融合机制,识别红绿灯、停车标志等交通要素。
2021年 AI Day:引入BEV + Transformer: 特斯拉提出基于多摄像头拼接构建的BEV(Bird’s Eye View)语义空间,并通过Transformer提取时空依赖关系,实现更强遮挡推理与路径预测能力,标志着系统感知结构全面转向空间+时间理解。
2022–2023年 Occupancy Network 推出: 引入3D空间占据网络,用于替代静态物体语义分割,提升空间几何精度与实时性,为去地图化打下基础。部署于FSD Beta v11系列中,支持城市NOA的全面扩展。
2023年末发布FSD v12: 正式上线端到端神经控制器,感知直接映射至转向、加速、刹车动作,彻底取代规划与控制模块。这一升级意味着智能驾驶真正进入**“One Model”时代**,也标志着行业从模块化向认知驱动模型全面转型。
HW4.0平台(2023+): 在部分车型上部署高分辨摄像头与毫米波雷达(激光雷达仅用于Dojo训练),进一步提升全场景感知能力,为FSD大模型的推理提供硬件支撑。
AI5平台与FSD v13(2025预期): 计划搭载全新FSD芯片,算力提升至2500 TOPS,具备训练+推理一体能力,为多模态VLA结构运行提供充足支撑。
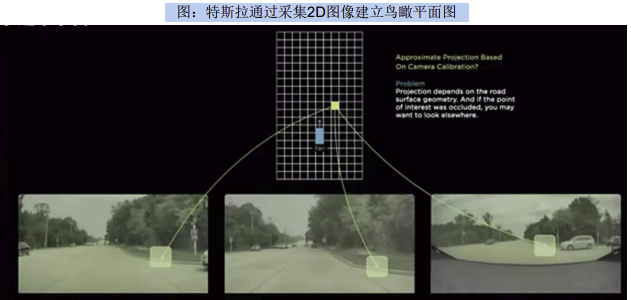
2D BEV
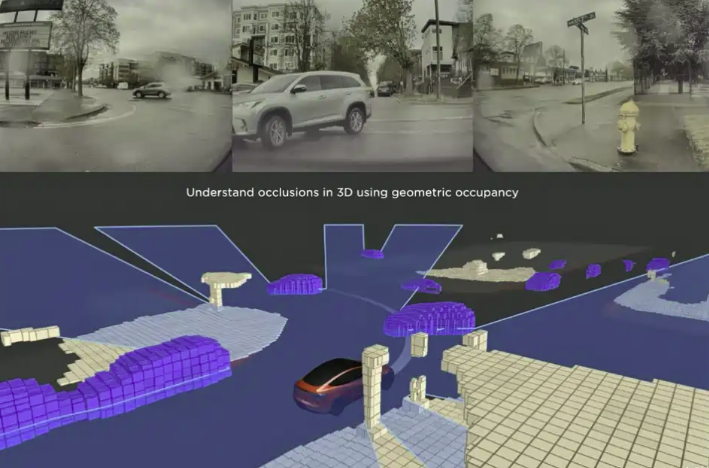
3D Occupancy map
综上,特斯拉的NOA从2014年AutoPilot 1.0起,经历了从规则驱动(FSM)阶段 → 模块化感知融合阶段 → 纯视觉阶段 → BEV+Transformer阶段 → 端到端控制阶段的五轮迭代,逐步完成从高速NOA向城市NOA的跨越。
特斯拉率先实现了从外部平台(Mobileye、NVIDIA)向自研芯片(FSD)转型,从依赖高精地图向Occupancy构图演进,并通过BEV+Transformer结构突破传统感知瓶颈;自FSD Beta v12起,正式引入端到端神经网络控制器,实现由感知直接输出动作信号(转向角、加速度、电机扭矩等),彻底摆脱规则和状态机。
在硬件层面,特斯拉于2023年推出HW4.0平台,新增高精毫米波雷达并强化摄像头体系,算力预计达500–600 TOPS;其AI5平台预计2025年问世,配备下一代FSD芯片,算力或达2500 TOPS,支撑大模型与复杂推理需求。
这一路径不仅体现出特斯拉作为“智驾大模型先行者”的技术先发优势,也为中国品牌提供了路径参照:即通过芯片+算法+数据的全栈闭环,率先完成去高精地图化、端到端控制闭环与全场景泛化能力。
3.2.2 小鹏技术演进:
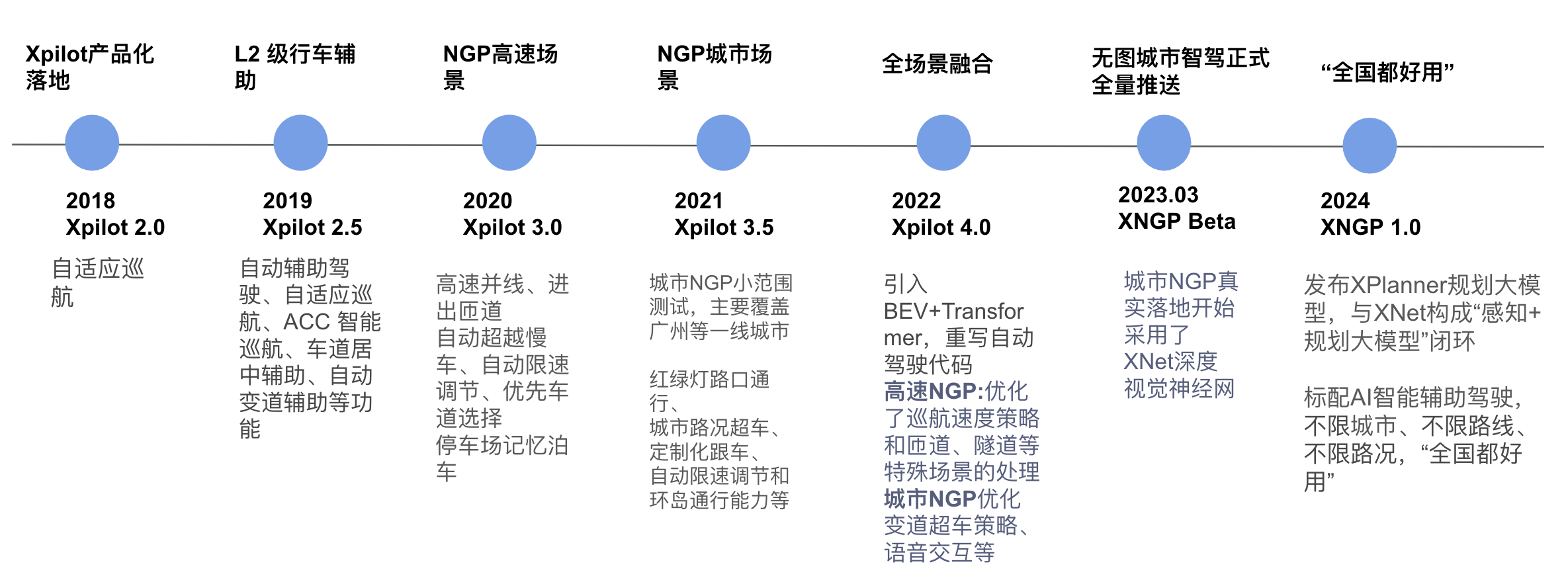
小鹏城市NOA技术演进路径(时间轴)
2018年:发布 Xpilot 2.0,定位“智能化先锋”,初代功能包括:
自适应巡航(ACC)
车道保持辅助(LKA)
2019年起:通过 OTA 升级为 Xpilot 2.5,实现辅助功能初步融合:
泊车辅助功能上线
城市驾驶辅助能力如:
交通拥堵辅助(TJA)
自动变道辅助(ALC)
高速NOA与城市辅助功能初步结合
2021年:升级为 Xpilot 3.5 / NGP(Navigation Guided Pilot):
开启城市导航辅助驾驶(NGP)的小范围测试
结合用户反馈不断迭代软件版本
2022年:推出 XNet 感知架构:
BEV+Transformer 感知方案
无需依赖高精地图即可构建 3D语义场景
硬件平台升级为:
双Orin-X芯片
双激光雷达支持,提升感知精度与算力冗余
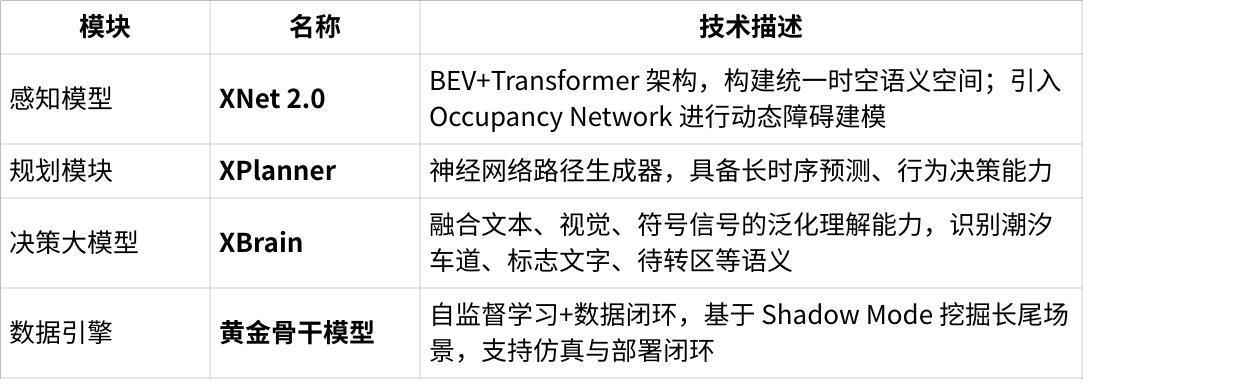
2023年:正式发布 XNGP Beta版,进入“全场景无图辅助驾驶”落地元年:
XNet 2.0:融合多模态传感器(摄像头、激光雷达、IMU)
使用Transformer提取高语义特征
构建动态3D Occupancy地图
替代传统高精地图部分功能
路径规划模块升级为 XPlanner 大模型规划器:
强泛化能力
高速推理性能
更适应复杂城市场景的动态决策需求
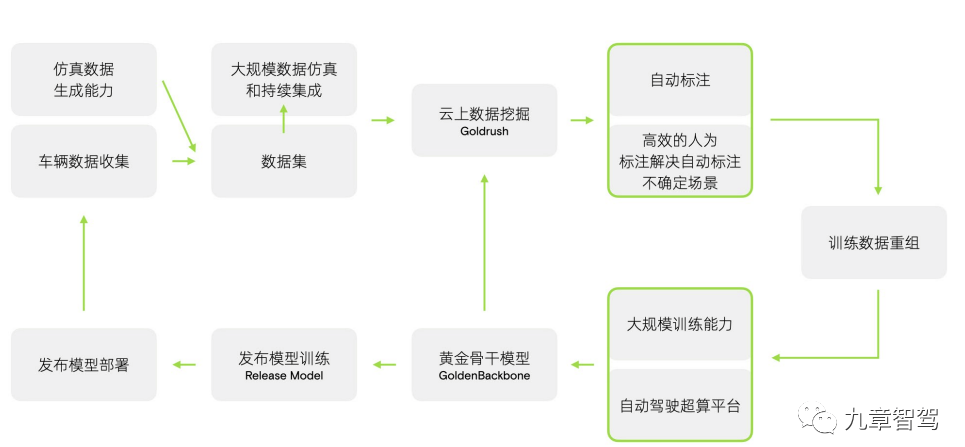
小鹏进一步通过端到端大模型结构提升泛化能力,持续从海量真实路况数据中学习驾驶策略,并借助城市级仿真平台生成corner case进行模型鲁棒性训练。到2024年,小鹏XNGP已实现对全国绝大多数城市的“无图化泛化部署”,形成产品认知“全国都好用”,构筑品牌差异化优势。
总体来看,小鹏通过“架构+数据+算力”的持续进化,构建了“BEV+大模型+无图化”的完整闭环,其路线呈现出从规则与地图依赖 → 感知结构自研 → 大模型推理 → 真正泛化能力释放的典型国产突破范式,成为城市NOA赛道的技术破局者之一。
3.2.3 理想技术路线:
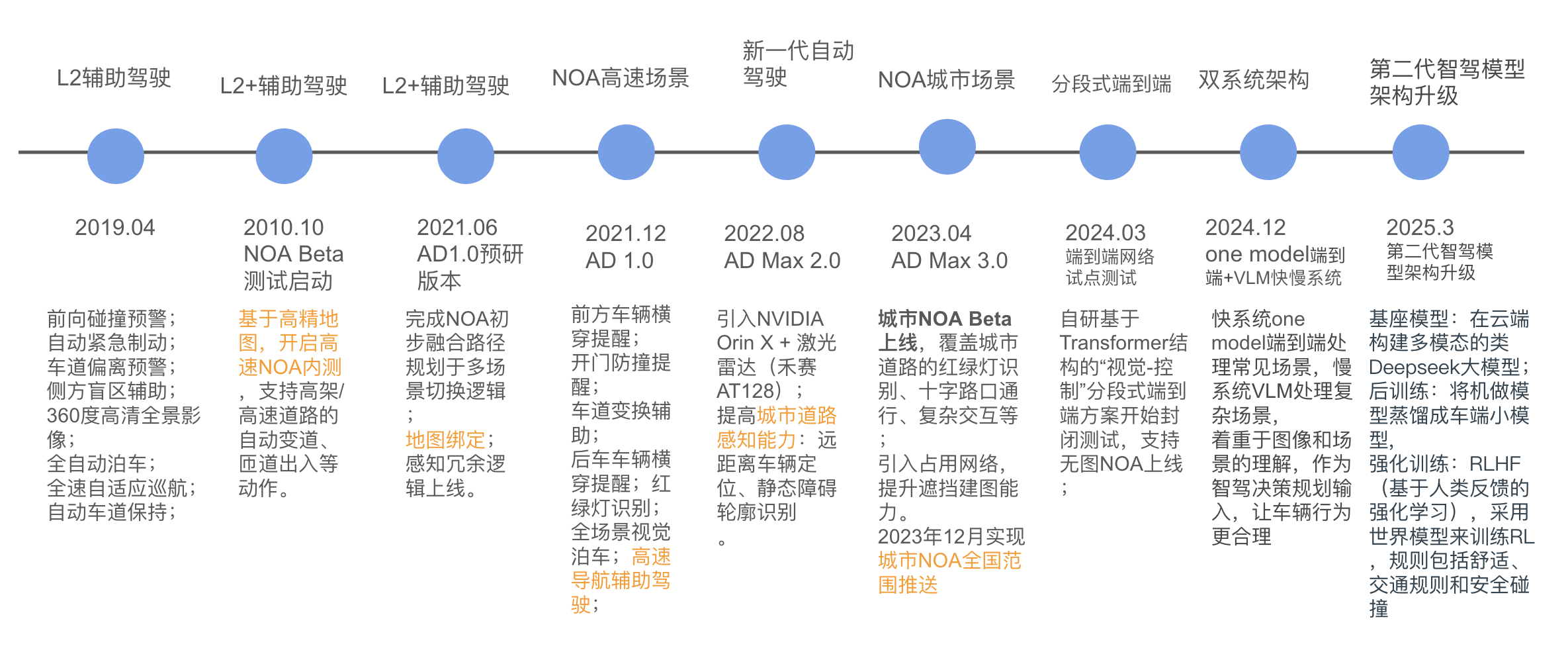
理想智能驾驶整体技术路线遵循“功能迭代 → 感知进化 → 架构升级”三阶段策略,逐步实现从传统L2辅助驾驶到城市NOA,再向通用智能体系统过渡。
阶段一:功能迭代(2019–2022)
自2019年发布首代L2功能(LDW、LCA、ACC等)起,理想逐步构建自动驾驶基础能力。2021年推出AD 1.0,实现高速NOA,支持变道辅助、上下匝道等典型操作。2022年发布AD Max 2.0,引入双Orin-X芯片与双激光雷达,为城市NOA感知能力拓展提供基础。
阶段二:感知进化(2023)
2023年理想发布AD Max 3.0,标志城市NOA基于高精地图方案正式全国推送。同时引入多模态感知、融合视觉/雷达/激光数据,以及占用网络技术,提升障碍物识别与动态建图能力,应对城市复杂场景。
阶段三:架构升级(2024–2025)
理想进入“无图NOA + 快慢系统融合”时代:
快系统使用轻量化端到端模型(One Model)处理常见驾驶场景,具备前馈控制与实时响应能力;
慢系统引入视觉语言大模型(VLM),可理解多模态输入(图像+语音),用于处理复杂/边缘工况与策略生成。两者协同,实现大脑“直觉+思考”的联动机制。
2025年,理想推出新一代VLA智能体架构,融合“3D编码感知+语言推理+策略生成器”三大模块,具备“听得懂、看得见、找得到”的泛化能力。驾驶员一句语音“靠边停车”,系统可实时理解意图、分析周边场景、生成目标路径,实现从感知到控制的统一闭环。
总体而言,理想的城市NOA路线呈现出从规则驱动 → 感知增强 → 多模态大模型 → 泛化智能体的进化曲线,是国内智能驾驶架构升级路径中最具“认知理解+语义泛化”特色的代表之一。
3.2.4 蔚来技术路线:
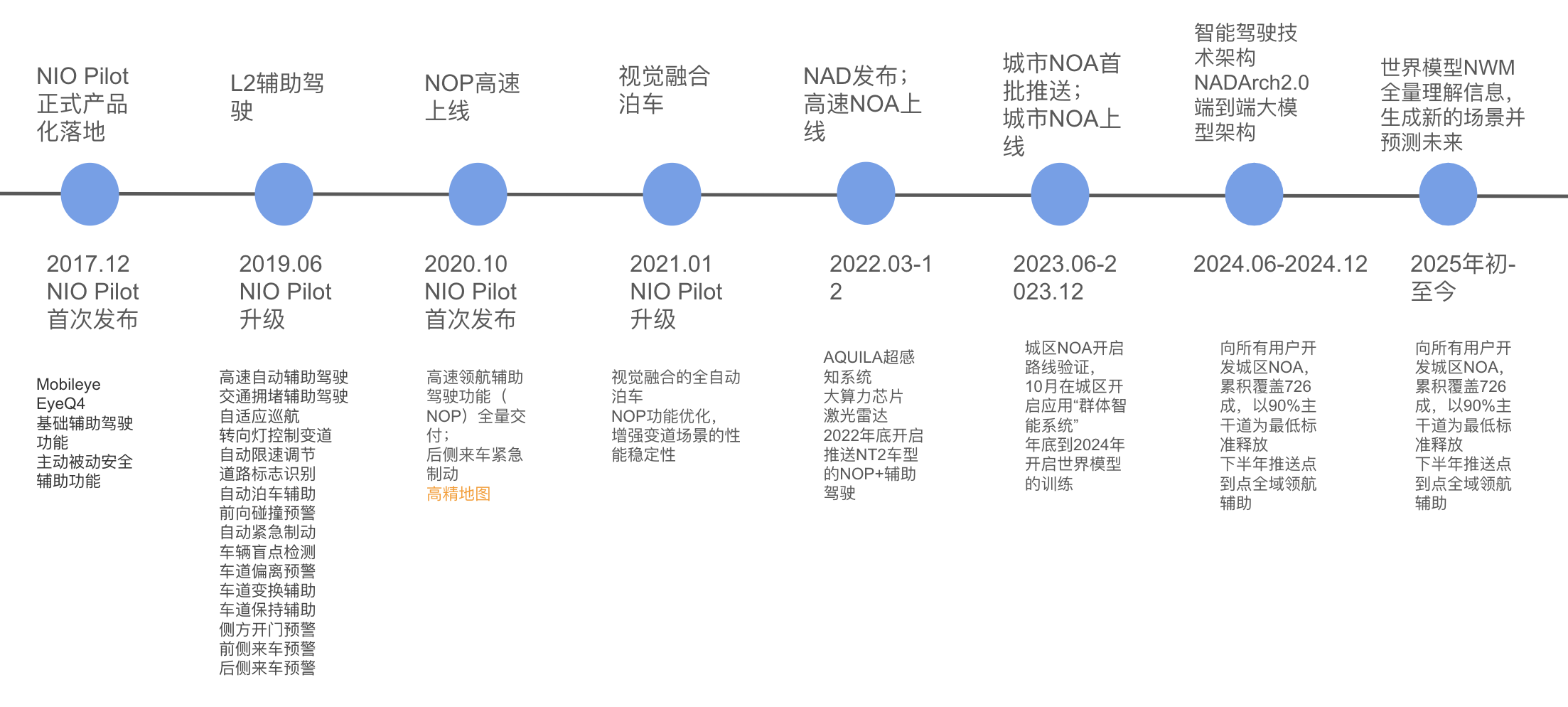
蔚来城市 NOA 推进路径
2017年12月:发布 NIO Pilot,依赖 Mobileye EyeQ4 芯片,支持高速NOA起步。
2020年10月:推出 NOP Pilot 升级版本,加入自适应巡航、车道保持、车道偏离辅助等核心能力。
2022年3月:搭载NT2平台车型,发布自研 NAD系统,包括:
33个传感器组成的 Aquila硬件平台
4颗Orin芯片组成的 Adam超算平台
推出 NOP+ 功能,正式进入城市道路辅助驾驶阶段。
2023年6月:城市NOA功能开启小范围用户开放测试,初步具备:
红绿灯识别
环岛通行处理
城市路口的动态障碍绕行与路径选择
2024年:发布 NAD增强版本,技术演进包括:
引入 BEV感知融合模块
引入 Transformer预测模型
城市NOA能力拓展至更多 一线/二线城市
2025年起:计划正式部署 点到点无图导航(Point-to-Point NO Map Navigation)
支持城区NOA的全国范围落地与无图部署
世界模型NWM:通向L3/L4的认知闭环核心
蔚来构建了名为 NWM(NIO World Model) 的通用环境建模系统。其本质是一个基于 BEV语义建图 + Occupancy网络 + Transformer推理 的统一语义空间,旨在支持车辆对环境的三维建模、时空预测与语义理解,突破地图依赖限制,增强泛化部署能力。
该模型不仅整合感知→建图→预测三大环节,还能够从多源数据中生成策略输入。蔚来强调通过真实驾驶数据+生成式仿真+三维重建构建训练场景,并不断优化世界模型泛化能力,形成“端到端+模块调度+语义空间推理”的融合能力。
技术趋势:从重地图→重感知→重建模,向大模型统一架构演进
蔚来当前的系统正加速从高精地图依赖,向轻地图+重感知演进,核心架构逐步向端到端靠拢,同时保留模块间的可控边界与冗余机制。这一策略与小鹏(BEV融合 + OCC预测)与理想(快慢系统协同)形成差异化:蔚来更强调**“构建环境语义空间”**,将城市感知、动态建图、行为生成纳入统一大模型框架。
3.3 硬件系统对比:从硬件堆叠走向芯片-模型协同
随着城市NOA进入无图化与泛化部署阶段,主机厂正在由“堆叠式硬件架构”迈向“芯片-模型协同优化”的路线。高算力、低功耗、平台集成度以及对大模型的适配能力,正成为智能驾驶核心硬件系统的关键评价标准。
多模态传感器逐渐标配,感知覆盖从静态拓展到动态全场景理解,激光雷达价格持续下探。
AI大模型驱动芯片需求跃迁,自研SoC成为整车厂构建智驾护城河的重要路径。
3.3.1 主流厂商芯片与算力平台对比
特斯拉 Tesla
使用 HW4.0平台 + 自研FSD芯片(FSD Chip v2),不再依赖激光雷达,采用:
8 颗摄像头 + 1 毫米波雷达(2023年起重新引入)
算力约 500–600 TOPS,支撑纯视觉城区NOA能力(基于 Occupancy Network 和 BEV 结构)
FSD Beta 城市NOA已在北美广泛部署,算力和能效比行业领先。
蔚来 NIO
智驾系统演进路线:Orin X(ET7/ES7) → 自研 NX9031(ET9)
ET7:搭载 4 颗 NVIDIA Orin-X,整车算力 1016 TOPS
ET9:全球首款上车自研大算力芯片 NX9031(“神玑”),专为大模型语义推理优化,支持运行 NWM 世界模型(支持时空建图 + 策略决策解耦)
感知系统构成:
“Aquila超感系统”:33 个传感器节点,含 3 广角摄像头、1 主摄、1 激光雷达、5 毫米波雷达、12 超声波雷达等
具备“软硬协同、模型驱动”的系统闭环特征,面向L3能力演进。
理想 Li Auto
原平台为 2 颗 NVIDIA Orin-X,508 TOPS(如L9、L8)
最新 Max 系列车型上,已切换至 Thor-U 芯片(700 TOPS),为 L3 设计预留算力空间
推出端到端视觉语义架构(VLM/VLA),强调统一模型适配“感知-理解-行为”链路
公布规划:2025年起全系标配激光雷达,以增强感知精度与冗余能力
小鹏 XPeng
芯片演进路径:EyeQ4(Xpilot 2.5)→ Xavier(Xpilot 3.0)→ Orin-X(Xpilot 4.0/XNGP)
当前主力平台为:2颗 Orin-X,508 TOPS
搭载 13 摄像头 + 激光雷达 + 毫米波雷达,支撑无图城市NOA部署
推出自研计算平台:XCCP 中央计算平台(XEEA 3.5)
架构集成智驾、座舱、车控网关等多个域
实现 硬件成本下降40%,整车算力利用率提升50%

点击图片可查看完整电子表格
3.3.2 自研芯片进展:从硬件堆叠走向“芯片+模型”深度耦合
行业趋势:
高算力芯片 + 自研大模型 + 云边端协同训练,成为智能驾驶系统核心能力的构建基础;
高端通用芯片(如Orin-X)成本高企,推动主机厂自研以控制成本并优化模型运行效率;
自研芯片可实现更高能效比与对模型结构的精细适配。
一.芯片自研更好适配自研算法
蔚来 NIO
上车芯片:自研 神玑 NX9031
应用车型:ET9、新ES6、EC6、ET5T
技术亮点:单颗算力 ≈ 4×Orin-X,支持 NWM 世界模型运行,具备高功能安全等级与优秀功耗控制
战略价值:已初步达成“整车厂芯片自研”战略落地目标
小鹏 XPeng
上车芯片:自研 图灵 AI 芯片
应用车型:G7(首款AI架构车)
架构特色:搭载 3颗图灵芯片,可同时运行智驾+座舱双大模型(VLA + VLM)
实际算力:有效算力约 2200 TOPS,约等于9颗传统智驾芯片
理想 Li Auto
当前进展:已量产自研 碳化硅功率芯片,正在推进智能驾驶芯片开发
目标架构:适配端到端+大模型架构,强化整车算力闭环能力
特斯拉 Tesla
芯片平台:FSD Chip V2(自研),搭配 HW4.0 硬件系统
技术特色:纯视觉感知架构支撑 Occupancy Network,无需激光雷达
上车效果:已支撑北美城区NOA大规模部署,能效比行业领先
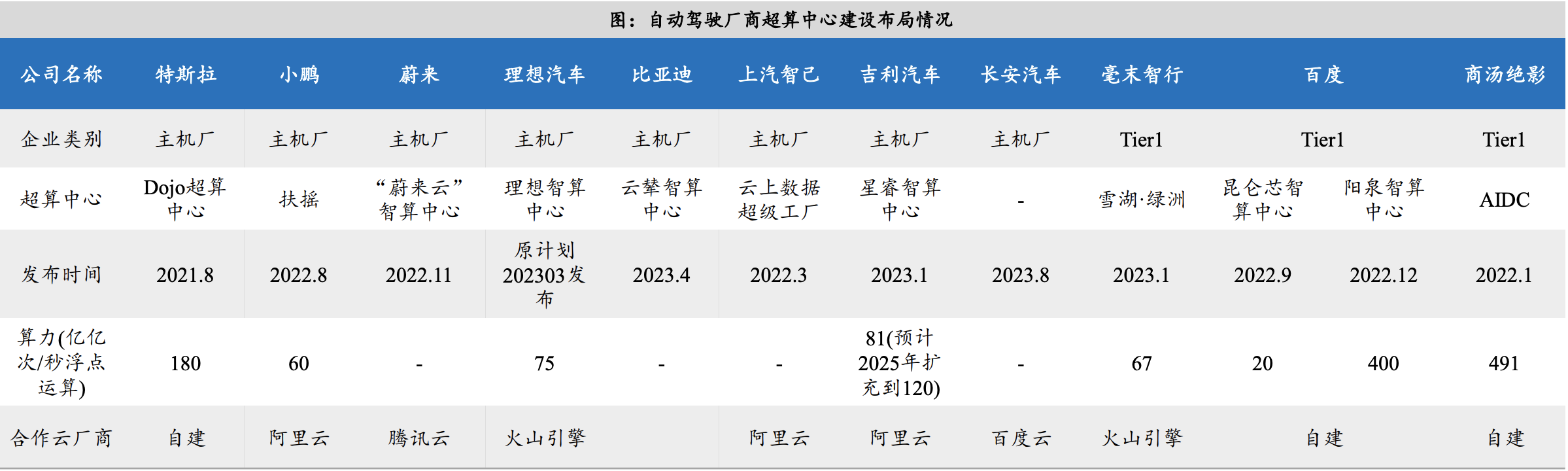
二、自建智算中心:训练提速、数据闭环打通
建设趋势
面向 PB 级数据的模型训练需求激增,推动主机厂加速构建“自建智算中心”;
智算中心成为大模型训练效率与数据闭环速度的决定性因素。
小鹏 XPeng
智算中心名称:扶摇
合作伙伴:阿里云
建设位置:乌兰察布(2022年建成)
峰值算力:600 PFLOPS
成果:核心模型训练周期从 7 天缩短至 1 小时,提升近 170 倍
理想 Li Auto
云端算力储备:4.5 EFlops
正联合火山引擎在山西布局智算中心,支持端到端大模型训练
构建覆盖车端-边缘-云端的训练闭环体系
蔚来 NIO
云端训练系统支持 百倍于车端模型规模的无监督大模型训练
训练数据无需标注,聚焦 PB 级数据处理能力,适配世界模型推理任务
特斯拉 Tesla
智算平台:Dojo 超级计算机
预计 2024 年完成部署,峰值算力目标 100 EFLOPS
专为端到端模型 Occupancy Network 优化训练路径
厂商布局概览:
3.4 功能配置对比分析:基础趋同,高阶分化
功能配置上,主流品牌基础智驾配置趋于同质化,
一、基础功能全面覆盖,主流车型已同质化
中高端电动车基础智驾功能高度一致化:
主流标配功能:ACC(自适应巡航)、LCC(车道居中)、APA(自动泊车)、PDC(前后泊车雷达)、FCW(前向碰撞预警)、BSD(盲区监测)、RCTA(后方横向来车预警)
这些功能构成智能驾驶入门级配置,已成为20万以上主流车型“标配底线”
** 二、C-NOA 城市领航辅助:标配化趋势明显
随着大模型感知与规划能力提升,城市NOA(C-NOA)正在成为智能车型的主流卖点;
各大厂商(小鹏、理想、蔚来等)已将其作为产品“卖点功能”标配;
依赖大模型能力(如BEV+Transformer/Occupancy Network)+高精定位/建图
** 三、高速NOA:20万级以上车型标配,高阶能力差异化
高速NOA功能已基本覆盖中高端智能电动车,是“上车的门槛功能”;
多数品牌实现:导航路径自动变道、匝道进出、自动上下匝道等;
但在匝道识别准确率、拥堵跟车体验等方面存在感知模型差异

点击图片可查看完整电子表格
√‑:带有该功能的基础版本
√ : 带有该功能
—:不带有该功能
四、主动安全:感知全面、控制策略分化明显
感知类主动安全功能趋于全覆盖:
BSD(盲区监测)、RCW(后向碰撞预警)、TSR(交通标志识别)等均已普及;
控制干预类功能存在明显差异:
- *AES(主动紧急转向)、FCTB(前向碰撞主动制动)**等高级主动干预功能:
仅理想L9、蔚来ET7等高端车型支持;
显示出控制策略算法和车辆控制器能力的差异

点击图片可查看完整电子表格
五、泊车能力:从APA向RPA/VPA/HPA进化
各厂商智能泊车能力向更高级别进化:
RPA(遥控泊车):用户在车外通过手机控制泊车
VPA(记忆泊车):可自动记忆和回放特定路径停车
HPA(代客泊车):自主寻找并泊入车位(仍在迭代中)
理想、小鹏部署最完整,已逐步实现量产落地
六、特斯拉在中国市场主动安全能力相对保守
中国版特斯拉在主动安全功能上较为谨慎配置:
更多依赖被动安全机制(气囊/结构)与驾驶提醒机制;
缺乏本地化的细粒度控制策略(如自动避障、车道强制保持)
3.5 软件算法演进趋势与品牌对比
行业算法架构演进:从模块式到端到端
当前主流技术路线逐步经历以下几个阶段,逐步向“纯视觉 + 大模型 + 全端到端”演进:

点击图片可查看完整电子表格
总结
:各家厂商当前多处于
阶段3(特征级融合)
向
阶段4(控制级E2E)
过渡的阶段。特斯拉、理想、小鹏走在前列。
3.5.1 特斯拉算法演进路径(2018–2025)
🔹 第一阶段(2018–2020):传统三段式 + 高精地图
感知:依赖摄像头 + 毫米波雷达识别静态语义;
规划:结合高精地图和有限状态机判断行为;
控制:指令执行模块;
特点:架构稳定,地图依赖重,主要应用于高速NOA。
🔹 第二阶段(2020–2022):BEV + Transformer 感知架构
多摄像头纯视觉,构建统一BEV语义空间;
Transformer整合时序,建模完整场景;
去地图化进程启动,为更广泛的泛化能力做准备。
🔹 第三阶段(2022–2025):Occupancy Network + E2E 控制器
Occupancy 网络实现动态连续空间建模,不再依赖明确物体边界;
引入高精毫米波雷达增强可用性;
FSD v12/13 引入 E2E控制器,直接输出方向盘与踏板指令;
真正实现“感知→控制”一体化神经网络闭环。
特斯拉数据闭环系统能力
自2022年起,特斯拉构建出完整的数据驱动闭环体系,是其E2E算法快速演进的核心支撑。
车辆端:大规模车主实车采集(百万量级);
云端:Dojo集群用于高频模型迭代;
工具链:自动标注、数据筛选系统,提升数据效率;
仿真端:策略补强用极端/罕见场景仿真生成并参与训练。
3.5.2 小鹏:从规则逻辑到全场景大模型
小鹏自动驾驶系统从 Xpilot 到 XNGP,完成了从规则逻辑 → 感知驱动 → 大模型驱动的三阶段演进,技术架构逐步升级为端到端BEV+Transformer+Occupancy体系,全面摆脱高精地图依赖:
阶段一:Xpilot 2.x(规则逻辑 + 高精地图)
时间节点:2019年发布 Xpilot 2.5
典型功能:ACC自适应巡航、LCC车道居中、自动变道辅助
技术架构:
三段式“感知–规划–控制”架构
决策规划依赖高精地图与状态机控制
场景泛化能力有限,主要覆盖高速场景
阶段二:Xpilot 3.x(NGP → 感知增强 + 导航融合)
优化方向:提升感知精度,引入导航路径作为软决策依据
技术特点:
感知仍以规则逻辑为主,部分场景由状态机管理
引入动态导航线用于路径引导
限制问题:依然高度依赖高精地图,泛化能力不足,难以覆盖复杂城市场景
阶段三:XNGP(BEV + Transformer + Occupancy + 大模型)
发布时间:2023年
核心特征:全场景无图、端到端语义决策架构
技术组成:
点击图片可查看完整电子表格
Occupancy Network:
替代传统语义分割
提升空间建模的连贯性与遮挡场景推理能力
架构转型:
从“感知–规划–控制”三段式 → “感知–预测–控制”端到端
彻底脱离高精地图,依赖视觉语义空间引导行为与路径
3.5.3 蔚来技术演进
蔚来的自动驾驶系统沿着“从规则到学习驱动”、“从依赖地图到感知建图”的方向演进,逐步构建出具备世界建模能力与交互式行为推理能力的高阶智能驾驶系统。整体架构可支持高精地图与纯感知双模切换,并通过“群体智能+世界模型”的端云协同方式持续迭代与泛化。
一. 架构演进路径
算法框架: 从 rule-based 的 NOP,演进为数据驱动、端到端分段学习的世界模型 NWM(NIO World Model);
感知演进: 从单帧感知 → 多帧 BEV 表征 → 时序 Transformer 网络结构;
地图依赖: 从高精地图导航 → Occupancy 网络实时构图 → 支持“无图城区 NOA”;
规划策略: 从 NOP 的状态机路径规划 → NAD 的交互搜索 + 拟人博弈优化决策。
二. 感知与建图模块:NAD Lane 2.0 + Occupancy Network
蔚来在感知端采用 BEV + Transformer 结构的 NAD Lane 2.0 网络,结合前向多帧信息处理,适应城区复杂语义环境。同时引入 Occupancy 网络用于构建动态场景占据图,摆脱对静态高精地图的依赖。
感知模型输出:
动态 Occupancy Grid;
多类别语义分割;
精确定位的时空障碍物。
这些输出作为输入,传递给世界模型与行为规划模块,构成“端上世界建模”的基础。
三. 规划与控制链路:三层分层结构 + 博弈推演
为应对城市场景中的高复杂性与解空间爆炸问题,蔚来提出“全链路学习式的分层行为推理结构”:
第一层:多模态注意力网络
输入 Occupancy、语义地图、历史轨迹;
输出 Top-K(如10~100)个可行动作序列(候选轨迹)。
第二层:交互式搜索树(7秒/步)
以每秒为一阶段,模拟 7 秒的交互行为;
同时建模自车与他车的反应过程,实现行为博弈。
第三层:价值博弈网络(GAM)
对搜索树中的候选轨迹进行价值排序;
考虑“安全-舒适-效率”平衡,选出最拟人化的行为。
兜底控制:凸优化解算器
将轨迹输出转化为可执行控制信号,保证安全约束与鲁棒性。
该结构实现了从多模态信息 → 多轨迹推演 → 博弈评分 → 优化控制的完整闭环,相比早期规划方法,在城区 cut-in 场景中提升了约 30% 的驾驶安全性。
四. 世界模型部署与训练机制
蔚来的世界模型 NWM 已部署于 Banyan 平台的二代车型上,具备“场景理解+想象重建+推演预测”的能力,支持端侧运行。模型具备以下关键能力:
想象建图(imaginative reconstruction);
多目标轨迹预测(multi-agent simulation);
拟人行为推理(human-like policy reasoning);
泛化到新城市、新道路场景。
五. 群体智能与生成式仿真:数据闭环加速器
为满足世界模型的训练需求,蔚来构建了以“群体智能 + 生成式仿真”为核心的数据闭环系统:
群体智能采集: 通过海量用户车辆在城市路况中的行驶数据采集长尾场景;
生成式仿真训练: 在合成环境中模拟稀有、极端场景,提升模型鲁棒性;
世界模型微调: 将仿真轨迹与实车轨迹对齐,用于 fine-tune 端上模型。
六. 云端算力与系统演进
截至 2023 年 9 月,蔚来智能计算集群已达 1.4 EFLOPS;
2024 年 7 月,蔚来公布基于群体智能的端云总算力已超过 306.9 EOPS;
该能力为训练世界模型、行为博弈网络与自研大模型提供强大支撑。
七. 商业策略与付费模式
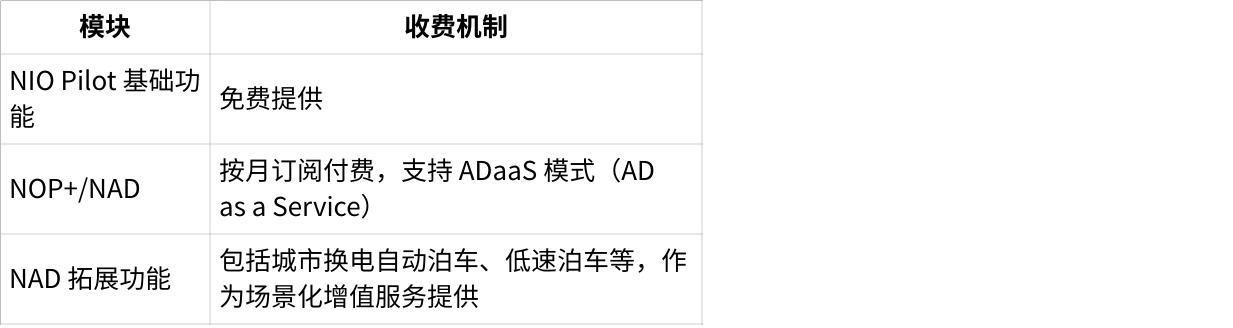
点击图片可查看完整电子表格
亮点场景:
支持高速行驶中自动驶入换电站→泊入→换电→驶出→自动汇入高速,全流程无需用户接管。
总结:蔚来技术栈的四大特征
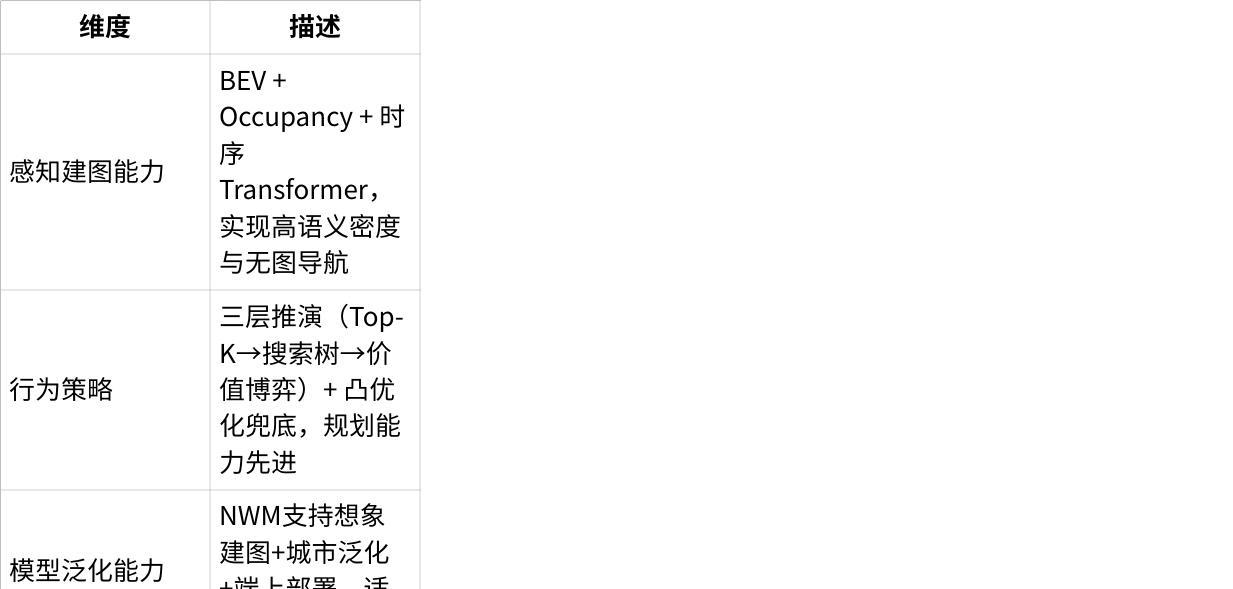
点击图片可查看完整电子表格
3.5.4 理想:从分段式端到端到 MindVLA,实现高泛化能力与长尾问题覆盖
理想的自动驾驶系统以快速迭代著称,采用“研发–量产”双线并行、滚动开发架构,在一年多时间内完成了从规则驱动到端到端+大模型的三次系统性演进:
阶段一:规则驱动 + 高精地图
采用传统的模块化架构,感知、定位、规划、控制各自独立部署;
功能依赖高精地图与状态机逻辑,NOA 已覆盖超100城;
泛化能力弱,复杂动态场景表现有限。
阶段二:引入大模型,走向数据驱动
AD Max 2.0:
感知结构升级为 BEV + Transformer;
核心模型:Neural Prior Network (NPN) 对 BEV 中稀疏区域进行“补全”,提升静态空间理解;
引入 TIN(Traffic Intention Net),用于红绿灯意图建模与理解,增强决策可靠性。
AD Max 3.0:
感知端引入 Occupancy Network,用于构建实时障碍物占用图,提升对动态物体的建模能力;
时空联合规划算法 支持避让施工、博弈变道等复杂策略;
启动“端到端+分模块”并行结构:
快路径:端到端大模型直接基于传感器(摄像头+激光+毫米波)输出路径、速度等控制决策;
慢路径:引入视觉语言模型(VLM),通过语言解析交通标识、复杂规则,辅助快路径进行更精细判断。
衔接逻辑:Occupancy Network 将感知结果投影到BEV空间;端到端控制器基于 Occupancy BEV 生成低时延控制信号;VLM作为认知模块参与复杂语义信息推理与高阶决策,构成“BEV Occupancy → 快速轨迹输出 + VLM慢逻辑调节”架构。
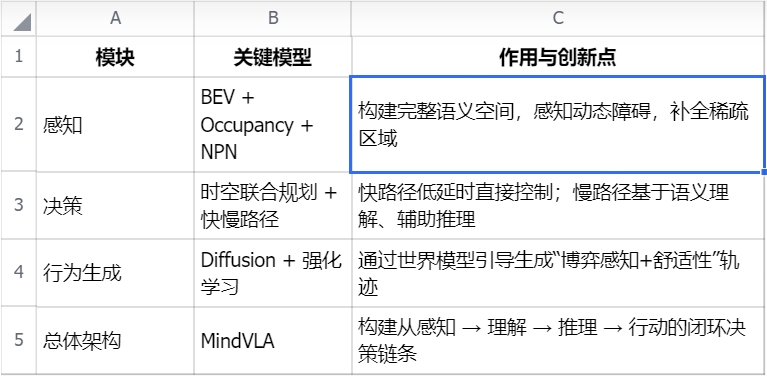
阶段三:MindVLA,一体化架构跃迁,支持世界建模与博弈推理
MindVLA(Vision-Language-Action)是一种全新的一体化通用驾驶大模型架构,目标是从数据驱动进化到认知驱动,具备场景泛化与动态博弈能力:
Vision 模块:采用 3D 高斯空间编码器,融合多源感知(摄像头、雷达)构建 2D/3D 多粒度语义地图;
Language 模块:基于 LLM,解析交通规则、驾驶意图、语义场景描述,通过 Chain of Thought(CoT)进行逻辑推理;
Action 模块:融合 扩散模型(Diffusion Policy) 与 世界模型+强化学习,输出当前情境下的最优轨迹。
世界模型中的奖励机制不仅考虑安全与舒适,还加入了“复杂交互博弈”的回报函数,使MindVLA能在交叉口博弈、道路资源竞争、临时场景中做出“拟人化”最优决策。
技术亮点总结