在复杂的动态环境中,单一的路径规划或控制策略常常难以兼顾全局最优性与局部可行性。本篇博客介绍一个结合了 四叉树(QuadTree)+ 模型预测控制(MPC)+ 深度强化学习(DRL) 的混合轨迹规划框架,该方案的主模块集中在 helper_main_continous.py 文件中,具备良好的模块化与通用性。
一、模块概览
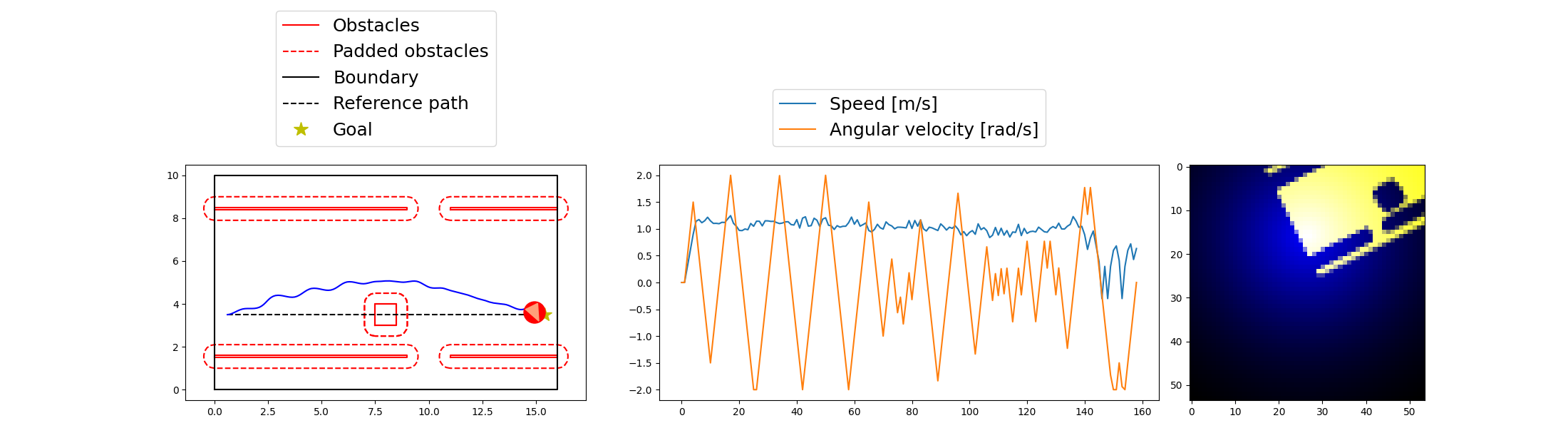
1. 地图生成与表示
generate_map():支持多场景自动生成地图,包括边界、静态/动态障碍物与目标点。get_geometric_map():将地图对象转换为可用于膨胀和路径推理的几何结构。Inflator类:对障碍物轮廓进行 buffer 膨胀,提升安全冗余。
2. 四叉树路径规划模块
- 由外部函数
create_quadtree_from_occupancy_map()从栅格占用地图创建四叉树划分空间 quadtree_to_mpc_constraints()(外部实现):提取四叉树路径节点所在区域的凸包,生成可传递给 MPC 的约束区域。
3. MPC 控制器接口
InterfaceMpc(外部模块):支持静态/动态障碍物约束注入与轨迹生成。integrate_quadtree_with_mpc():将自由空间区域和动态障碍一起传入 MPC,生成优化轨迹。
4. DRL 策略控制
- 控制逻辑中支持调用训练好的 DDPG / TD3 策略模型预测动作。
- 动作 smoothness 与可行性在
Metrics中有单独评估指标。
5. 智能切换模块
HintSwitcher:在 MPC 不再可行或目标区域过于复杂时,切换至 DRL 策略接管。- 切换机制基于当前轨迹与障碍物距离,具备滞回机制避免频繁切换。
二、系统整体工作流程
以下代码片段概括了系统的主要运行步骤:
# Step 1: 创建地图对象
map_data = generate_map()
mpc_controller = InterfaceMpc(map_data)
config = Configurator()
# Step 2: 四叉树路径规划
quadtree = create_quadtree_from_occupancy_map(occupancy_map)
constraints = quadtree_to_mpc_constraints(quadtree, current_state, goal_state)
# Step 3: MPC 轨迹生成
mpc_controller.update_static_constraints(constraints)
trajectory = mpc_controller.generate_trajectory(current_state, goal_state)
# Step 4: 智能控制切换(DRL or MPC)
switcher = HintSwitcher(max_switch_distance=5.0, min_detach_distance=8.0)
if switcher.switch(current_position, original_traj, new_traj, obstacle_list):
action = drl_model.predict(observation)
else:
action = mpc_controller.get_control_action()
三、关键函数解读
quadtree_to_mpc_constraints
将路径所经过的四叉树节点提取对应的多边形凸包作为可通行区域,转换为 MPC 优化器所需的约束形式。
def quadtree_to_mpc_constraints(quadtree, state, goal):
path_nodes = quadtree.find_path((state[0], state[1]), (goal[0], goal[1]))
free_space_polygons = []
for node_id in path_nodes:
if node_id in quadtree.convex_hulls:
hull = quadtree.convex_hulls[node_id]
vertices = hull.vertices.tolist()
free_space_polygons.append(vertices)
return free_space_polygons
integrate_quadtree_with_mpc
动态将静态与预测动态障碍加入 MPC 控制器,生成最优控制轨迹:
def integrate_quadtree_with_mpc(map, mpc_controller, current_state, goal_state, dynamic_obstacles):
static_constraints = quadtree_to_mpc_constraints(quadtree, current_state, goal_state)
mpc_controller.update_static_constraints(static_constraints)
# 转换动态障碍物为多边形约束
dyn_obstacles_for_mpc = []
for obs in dynamic_obstacles:
polygon = [(x + radius * np.cos(a), y + radius * np.sin(a)) for a in np.linspace(0, 2*np.pi, 8)]
dyn_obstacles_for_mpc.append(polygon)
mpc_controller.update_dynamic_constraints(dyn_obstacles_for_mpc)
HintSwitcher.switch()
使用 shapely 几何计算机器人与障碍物距离,当靠近障碍时切换到 DRL,远离时回归 MPC:
def switch(self, current_position, original_traj, new_traj, obstacle_list):
for obstacle in obstacle_list:
dist = Polygon(obstacle).distance(Point(current_position))
if dist < self.switch_distance and not self.switch_on:
self.switch_on = True
return True
elif dist > self.detach_distance and self.switch_on:
if self.detach_cnt > self.detach_steps:
self.switch_on = False
else:
self.detach_cnt += 1
return self.switch_on
四、性能评估模块 Metrics
提供多个维度的轨迹质量指标:
- computation_time:平均/最大/方差
- deviation_distance:跟踪轨迹的平均/最大偏移
- smoothness:控制输入的二阶导数平滑度
- clearance:离最近障碍物的最小距离
- success_rate:任务完成率
可输出为 LaTeX 表格格式。
五、小结
这个系统通过模块化的方式将地图理解、自由空间分割(QuadTree)、优化控制(MPC)与策略控制(DRL)无缝整合在一起,在保持轨迹平滑和可控的前提下,具备应对复杂障碍结构与动态环境的能力。
在实际部署中,可以根据任务复杂度、动态性与推理速度,灵活地配置切换阈值、优化步长与 DRL 策略细节。